|
1
|
- general framework
- analysis and synthesis methods for unstructured uncertainty
- stability with structured uncertainties
- unstructured perturbation
- structured perturbation
- definition of SSV
- examples
- tighter bounds
- tightness of bounds
- computing bounds using Matlab
- structured robust stability
- structured robust stability theorem
- robust performance
- extension to nonlinear time varying uncertainties
- HIMAT example
- skewed problem
- overview on m-synthesis
|
|
2
|
- Every problem can be put in the general framework with
- For analysis, the controller can be absorbed into the system:
|
|
3
|
|
|
4
|
- Assume D(s)=diag[d1Ir1,
…, dsIrs,
D1,
…, DF]
Î RH¥ with ||di||¥<1 and ||Dj||¥<1.
- Robust Stability Û The interconnection is stable.
- Stability Conditions:
- (1) (sufficient condition) ||M11||¥ £1
- Conservative: ignoring
structure of D(s).
- (2) (necessary conditions ) Test for each di (Dj)
individually (assuming no uncertainty in other channels): ||(M11 )ii
||¥ £1
- Optimistic: ignoring interaction between the di (Dj).
|
|
5
|
- Problem: Given M Î
C p´ q , find a smallest D Î C p´ q
(no structure imposed on D) in the sense of such that det(I-MD)=0.
- It is easy to see that
- with a smallest “destabilizing”
- So the largest singular value of M can be defined as
|
|
6
|
- Problem: Given M Î
C p´ q , find a smallest D Î D
- D={diag[d1Ir1,
…, dsIrs,
D1,
…, DF]
Î C p´ q
: di
Î C, Dj Î C mj´ mj
}
- such that det(I-MD)=0.
- We shall call 1/amin
as structured singular value (SSV).
|
|
7
|
- For M Î C n´ n
, mD(M) is defined as
- unless no D Î D makes I-MD singular, in which
case mD(M) :=0.
- If D={dIn : d Î C} (S=1, F=0, r1=n),
then mD(M)=r(M), the spectral radius of M.
- If D={D Î C n´n } (S=0, F=1, m1=n),
then mD(M) =
.
- Thus we have the following bounds:
- r(M) £ mD(M) £
|
|
8
|
- Let D={diag[d1, d2] Î C 2´ 2
: di
Î C}. Consider
two matrices:
- Thus neither r(M)
nor provides useful
bounds even in these simple cases
|
|
9
|
- To obtain tighter bounds, define U={U Î D : UU*=In}
|
|
10
|
|
|
11
|
- Example: Let M be a 13x13 matrix and suppose D is given by
- where the size of D
is specified by the matrix blk.
- >> [bounds,rowd] = mu(M,blk)
- >> [Dl,Dr] = unwrapd(rowd,blk)
|
|
12
|
- We are interested in the following question: How large D (in the sense of ||D||¥) can be
without destabilizing the feedback system?
- Since the closed-loop poles are
given by det(I-G(s)D)=0
the feedback system becomes unstable if det(I-G(s)D(s))=0 for some s in
the closed right half plane. Now
let a>0
be a sufficiently small number such that the closed-loop system is
stable for all stable ||D||¥< a. Next
increase a
until amax
so that the closed-loop system becomes unstable. So amax is the robust
stability margin.
- Consider a general feedback interconnection where D is structured uncertainty block and G(s) is the
interconnection matrix.
|
|
13
|
- Define
- D :={D(·) Î RH¥ : D(s0) Î D for all s0 Î }
- Theorem: Let b>0.
The interconnected system is well-posed and internally stable for all D(·) Î D with ||D||¥< 1/b if and only if
|
|
14
|
- Let
- Theorem: Let b>0.
For all D(s)
Î D with ||D||¥< 1/b , the system is well-posed, internally stable,
and ||Fu(Gp,
D) ||¥ £ b if and only if
|
|
15
|
- Suppose D Î DN is a structured Nonlinear
(Time-varying) Uncertainty and suppose D is constant scaling matrix such
that DDD-1
Î DN . (Note that we do not require DD=DD.)
- Then a sufficient stability condition for all D Î DN with ||D||¥< 1, is (by small gain theorem)
- ||D-1G(s)D||¥ £ 1
|
|
16
|
- We shall first find a H¥ controller using Matlab (details will be
discussed in later chapters. Just follow the steps here.), which gives g=1.8612= ||Gp||¥ , a
stabilizing controller K, and a closed loop transfer matrix Gp:
|
|
17
|
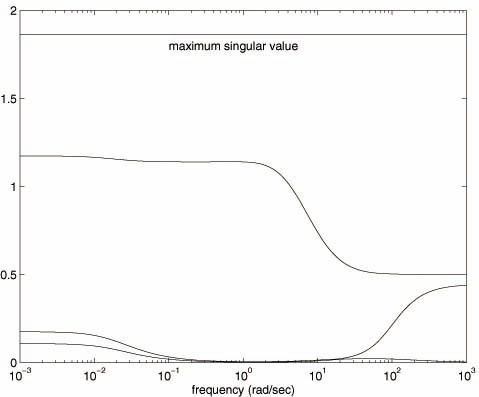
- Now generate the singular value frequency responses of Gp:
- >> w = logspace(-3,3,300);
- >> Gpf = frsp(Gp,w);
% Gpf is the frequency response of Gp;
- >> [u,s,v] = vsvd(Gpf);
- >> vplot(‘liv, m’, s)
- The singular value frequency responses of Gp are shown in
Figure 10.6
|
|
18
|
- To test the robust stability, we need to compute ||Gp11||¥ ,
- >> Gp11 = sel(Gp, 1:2, 1:2);
- >> norm_of_Gp11 = hinfnorm(Gp11,0.001);
- which gives ||Gp11||¥ =0.933<1. So the system is robustly stable.
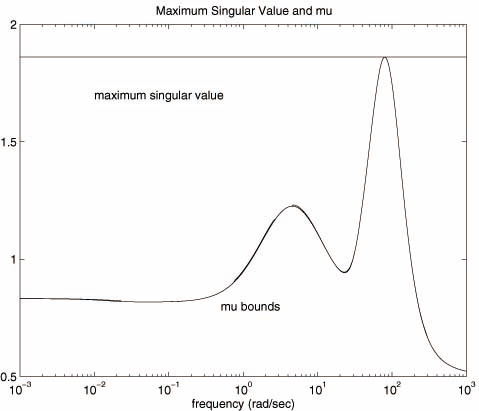
- To check the robust performance, we shall compute the for each frequency with
- >> blk = [2,2;4,2];
- >> [bnds,dvec,sens,pvec] = mu(Gpf,blk);
- >> vplot(‘liv,m’,vnorm(Gpf),bnds)
- >> title(‘Maximum Singular Value and mu’)
- >> xlabel(‘frequency(rad/sec)’)
- >> text(0.01,1.7,’maximum singular value’)
- >> text(0.5,0.8,’mu bounds’)
|
|
19
|
- The structured singular value
are shown in Figure 10.7. It is clear that the robust performance
is not satisfied. Note that
- Using a bisection algorithm, we can also find the worst performance:
|
|
20
|
- Recall the skewed problem in Chapter 8. It can be shown that robust
performance problem is equivalent to a 2 block structure singular value
with the following interconnection matrix
- So the robust performance condition is
- for all w³0.
|
|
21
|
- Now assume We=wsI, Wd=I, W1=I,
W2=wtI and P is stable and has a stable inverse
(I.e., minimum phase) and K(s)=P-1(s)l(s) such that K(s) is
proper and the closed-loop is stable. Then
- So = Si =1/(1+l(s))I=e(s)I, To = Ti =l(s)/(1+l(s))I=t(s)I
- and
- Let the SVD of P(jw) be
- P(jw)=USV*, S = diag(s1, s2 , …, sm)
- with and where m is the
dimension of P.
- Then
|
|
22
|
- Note that
- where P1 and P2 are permutation matrices.
- Hence
|
|
23
|
- The maximum is achieved at
- and
- Conclusion: The structure singular value of the skewed problem is
(approximately) proportional to the square root of the condition number
of the plant.
|
|
24
|
- Consider a general feedback system with interconnection G. Find a
stabilizing controller K so that the following m-norm is minimized:
- This problem is called m-synthesis.
- The m-synthesis is
not yet fully solved. But a reasonable approach is to “solve”
- by iteratively solving for K and D, i.e., first minimizing over K with D
fixed, then minimizing point-wise over D with K fixed, then again over K,
and again over D, etc. This is the so-called D-K Iteration.
|
|
25
|
- Fix D
- is a standard H¥ optimization problem.
- Fix K
- is a standard convex
optimization problem and it can be solved point-wise in the frequency
domain:
- Note that when S = 0, (no scalar blocks)
|
|
26
|
- Details of D-K Iterations:
- (i) Fix an initial estimate of the scaling matrix Dw Î D point-wise across frequency.
- (ii) Find scalar transfer functions di(s), di-1(s)
Î RH¥ for i =1,…,
(F-1) such that |di(jw)|» diw .
- (iii) Let D(s)=diag(d1(s)I, …, dF-1(s)I, I).
Construct a state space model for system
- (iv) Solve an H¥ optimization problem to minimize
- over all stabilizing K’s. Denote the minimizing controller by
|
|
27
|
- (v) Minimize
- over Dw
Î D point-wise across frequency. The
minimization itself produces a new scaling function .
- (vi) Compare with the previous estimate Dw ,
Stop if they are close, otherwise, replace Dw with
and return to step (ii).
- The joint optimization of D and K is not convex and the global
convergence is not guaranteed, many designs have shown that this
approach works well.
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}