
The PSE CPU Execution Visualization Tool
|
|
These pages contain output samples from a CPU visualization tool,
PSE (processor simulation elucidator), being developed by David Koppelman to support
his research at the LSU department of electrical and computer
engineering. Using a dataset file collected from a CPU
simulation PSE allows the user to visualize the execution of
instructions by the simulated processor. These visualizations can
provide insight in to the dynamics of an executing program that may
lead to better coding, compiling, or processor designs.
The program will be released in an early form some time this
summer (2003). It currently works with a modified version of the
RSIM simulator but will be written to allow easy interfacing
of other simulators.
Output samples decorate this page, examples showing interesting
features of processor operation are linked to this page.
|

PSE reads dataset files written by specially modified CPU simulators.
The dataset files contain the state transitions made by dynamic instructions
as they execute and also contains other simulation variables.
As currently used, state transition data is collected for every
instruction executing during 1000-cycle segments, the segments might be
spaced 10,000 cycles apart. Segment duration and spacing is a simulation
parameter and is chosen to balance the dataset file size with the
need for detailed data.
Overview Plot
PSE currently produces three kinds of graphs, an overview plot,
a reorder buffer (ROB) plot, and a pipeline execution diagram (PED) plot.
The overview plot (not shown on these pages) displays the execution
rate, in instructions per cycle (IPC), during each segment. The segments
can be ordered chronologically or in execution rate order. PSE
does not currently output these plots.
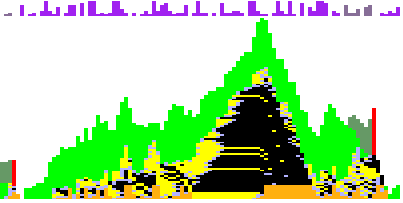
Reorder Buffer Plot
The reorder buffer plot shows the contents of the reorder buffer,
with time on the horizontal axis and reorder buffer position on
the vertical axis. Color is used to indicate instruction status or
state. A grayed color indicates an instruction that will
later be squashed (due to an exception or misprediction recovery).
Instructions entering the reorder buffer are shown separately
along the top of the plot (in purple).
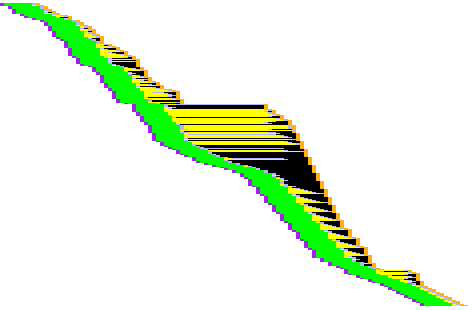
Pipeline Execution Diagram Plot
The awkwardly named pipeline execution diagram plot is a
re-formated version of the ROB plot. A dynamic instruction occupies a
horizontal strip, that is, its vertical position is fixed. (In the
ROB plot the vertical position of an instruction is based on its
location in the reorder buffer.) The data in the PED plot is also
upside down compared to the ROB plot, that is new instructions
appear below older ones. Some of the PED plots wrap from bottom to
top, for example, the long ones used as page separators. In some
PED plots white lines divide individual instructions and cycles.
Explanatory
Handled Well by Dynamic Scheduling
Not Helped by Dynamic Scheduling
Though instruction sets for processors are defined for the most part
using a one-instruction-at-a-time execution model processors, to
achieve high performance, actually overlap the execution of
instructions.
Statically Scheduled Processors
Instructions in statically scheduled pipelined processors
proceed though something like an assembly line, called a
pipeline. The pipeline is divided in to stages, with each
stage performing a particular step in the instructions execution, such
as fetch or decode.
The maximum number of instructions in flight is the product
of the number of stages and the width of the pipeline.
Statically scheduled processors are orderly in that most instructions
pass through the pipeline in program order. That orderliness can
limit performance because the pipeline must stall for
instructions that must wait at a stage for something to arrive. The
stall stops the advance of instructions from the stage holding the
waiting instruction back to the pipeline entrance. Because
instructions must remain in-order the held-up instructions cannot go
around the waiting instruction.
The instructions in a program are usually arranged, or
scheduled by a conscientious programmer or a compiler to
minimize such stalls. Processors are called statically scheduled
because they expect to run code prepared this way. (Statically
in this sense means performed before the program is run.)
Dynamically Scheduled Processors (Currently Incomplete)
Instructions enter and leave a dynamically scheduled processor
in program order, but other parts of their execution occur out of
order. One could think of such a processor as having three pipelines,
one for instructions to enter (fetch), one to execute, and one to exit
(commit). Instructions enter the fetch pipeline in program order
(in reality, a predicted program order).
An instruction can enter the execution pipeline only when everything
will be ready for it, and so the execution pipeline never need stall.
A ready-to-execute instruction need never be held by another
instruction waiting for something. Of course, there will be times
when there are no instructions ready to enter the execution and so
execution will not proceed at the maximum possible speed.