|
1
|
- LFT: Definition
- Properties
- Examples
- General Technique
- HIMAT Example
- Redheffer Star Product
|
|
2
|
- Let M be a partitioned matrix
- A (lower) linear fractional transformation (LFT) of M over D is defined as
- Fl(M, D):=M11+M12
D(I-M22
D)–1M21
- where D
has suitable dimensions and I-M22 D is invertible.
- Similarly, an (upper) LFT is defined as
- Fu(M, Du):=M22+M21 Du (I-M11
Du)–1M12
|
|
3
|
- Fl(M, D)
is well-posed if I-M22 D is invertible.
- (Fu(M, Du)
)–1 = Fu(N, Du) with N given by
- Suppose C is invertible. Then
- (A+BQ)(C+DQ)–1=
Fl(M, Q),
(C+DQ)–1 (A+BQ)= Fl(N, Q)
- If M12 is invertible, then Fl(M, Q)=(C+DQ)–1
(A+BQ)
- with A=M12–1M11 , B=M21 - M22 M12–1M11
, C=M12–1, and D=-M22 M12–1
- If M21 is invertible,
then Fl(M,
Q)=(A+BQ)(C+DQ)–1
- with A=M11 M21–1, B=M12 – M11 M21–1M22
, C=M21–1, and D=- M21–1
M22
|
|
4
|
- Feedback System: consider a feedback system with disturbance d, sensor
noise n, we can write this system in the LFT form with external inputs (d,
n) and controlled outputs (v,uf) such that z = Fl(G,K)w with
|
|
5
|
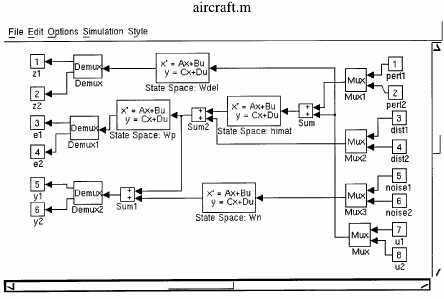
- Here we show more steps for putting in the LFT form. Note that G is the
transfer matrix between (w,u) and (z,y). It does not include the
controller K. It is better to ``pull out’’ the K in the first place as
shown below.
- Now find the G as the transfer
matrix between (w,u) and (z,y):
|
|
6
|
- A direct state space realization for G can also be obtained by
connecting the state space realizations of the components. Let
- That is,
- Now define a new state vector x=(xp, xf,xu,
xv) and eliminate the variable yp to get a
realization of G as
|
|
7
|
|
|
8
|
- Uncertain Function: assume each coefficient has some perturbation.
|
|
9
|
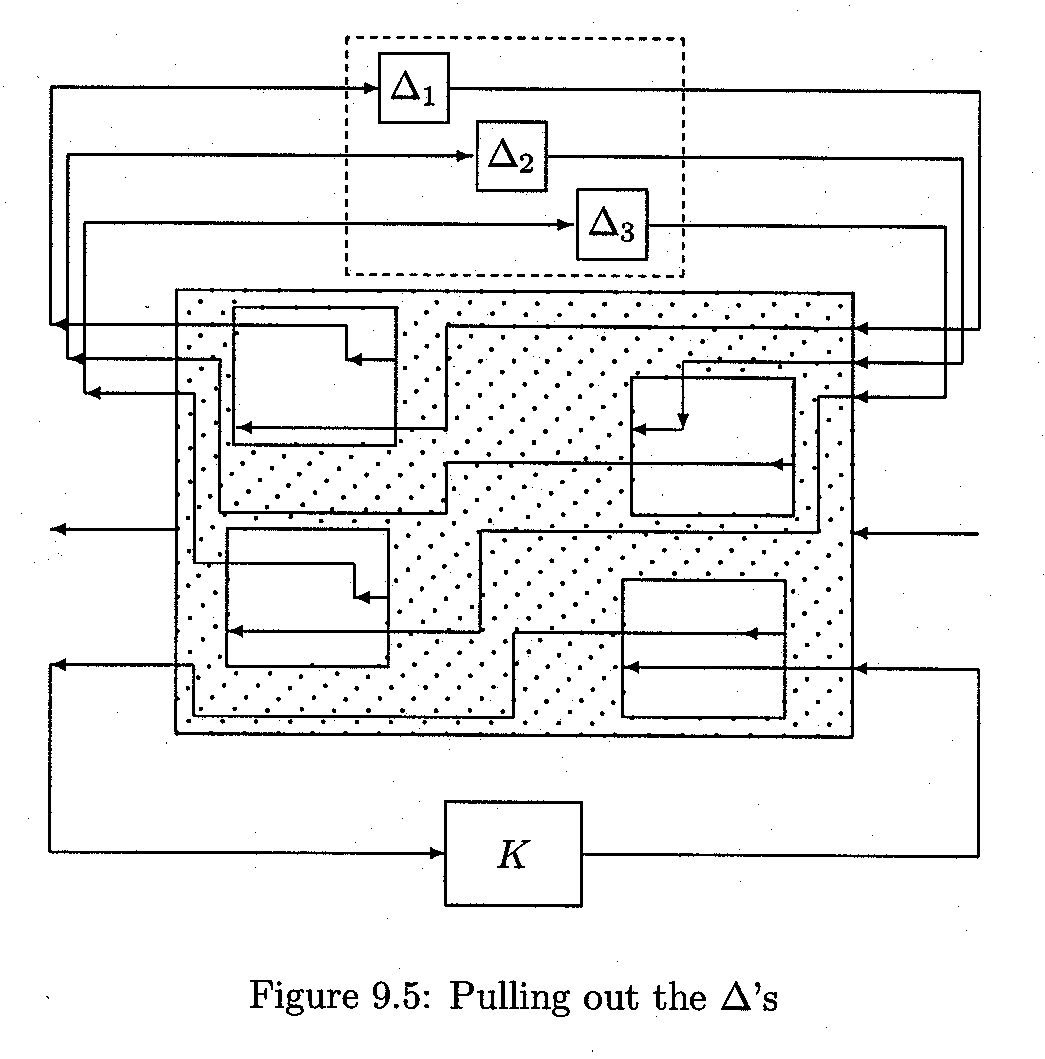
- More steps: pulling out the deltas.
|
|
10
|
- Parametric Uncertainty--A Mass/Spring/Damper System: assume each
coefficient has some perturbation.
|
|
11
|
- HIMAT Example: Consider a HIMAT system with
- The open-loop interconnection matrix is
|
|
12
|
- The interconnection matrix:
|
|
13
|
|
|
14
|
|
|
15
|
- Let P and K be two matrices with appropriate dimensions.
- Then the following interconnection, called a star product, is also a
matrix, denoted by P*K
|
|
16
|
- Let P and K be two transfer matrices with state space realizations. Then
the transfer matrix P*K is given by
- Matlab
- >> P*K =
starp(P,K,dimy,dimu)
- >> Fl(P,K) = starp(P,K)
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}