|
1
|
- By
- Kemin Zhou
- December 2000
|
|
2
|
|
|
3
|
|
|
4
|
- Robust and Optimal Control provides much more detailed and advanced
treatment of many topics in robust and optimal control. It is a must for
every researcher and graduate student.
|
|
5
|
- We give an overview of robust and optimal control:
- What is this book about?
- Highlights of this book.
|
|
6
|
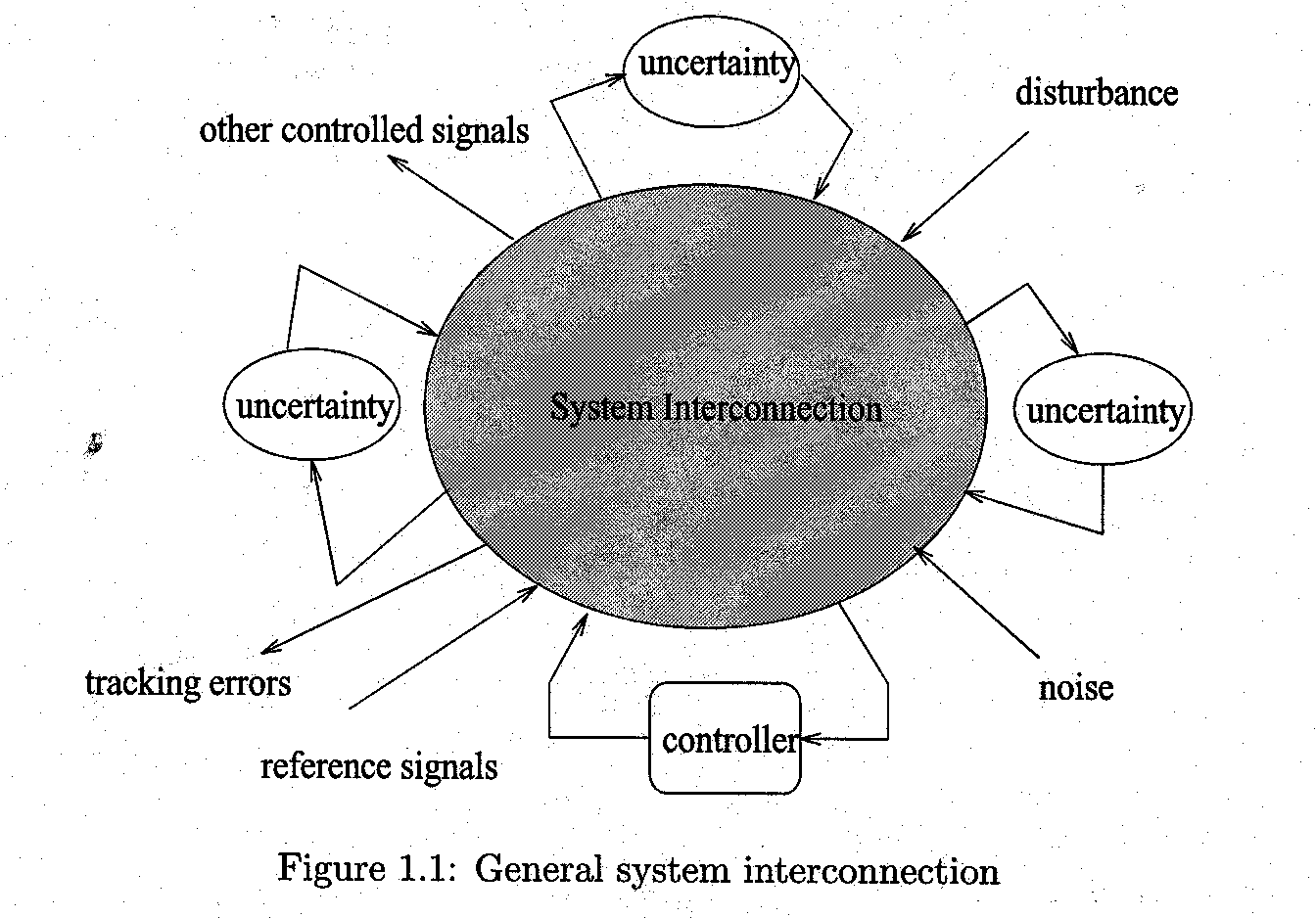
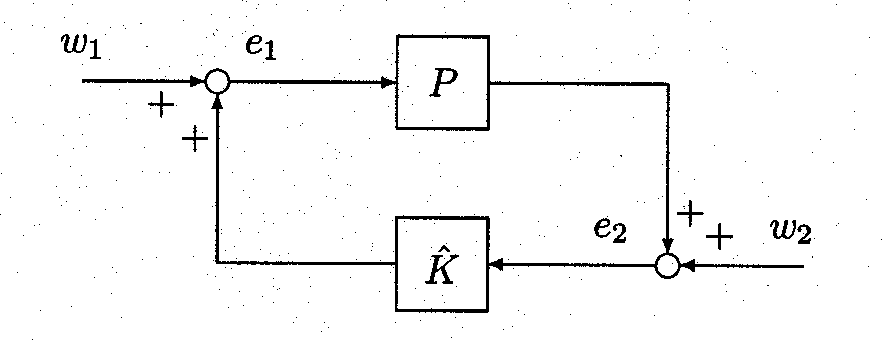
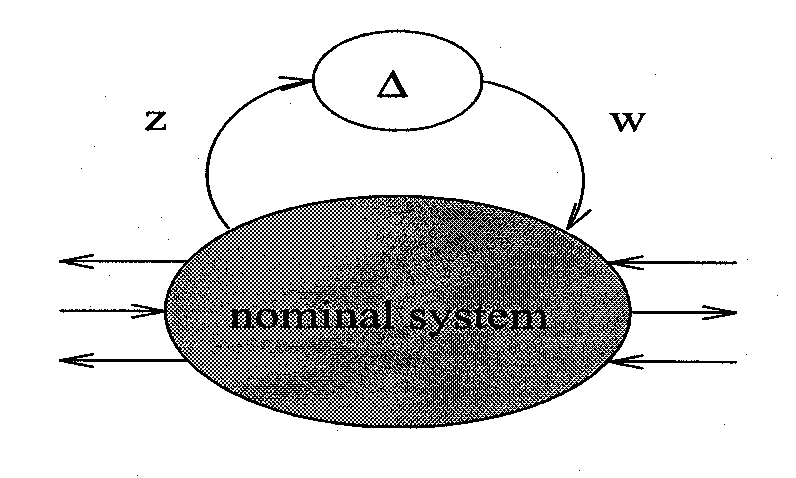
- This book is about basic robust and H¥ control theory. We consider a control
system with possibly multiple sources of uncertainties, noises, and
disturbances as shown in Figure 1.1.
|
|
7
|
- Analysis problems: Given a controller, determine if the controlled
signals (including tracking errors, control signals, etc.) satisfy the
desired properties for all admissible noises, disturbances, and model
uncertainties.
- Synthesis problems: Design a controller so that the controlled signals
satisfy the desired properties for all admissible noises, disturbances,
and model uncertainties.
|
|
8
|
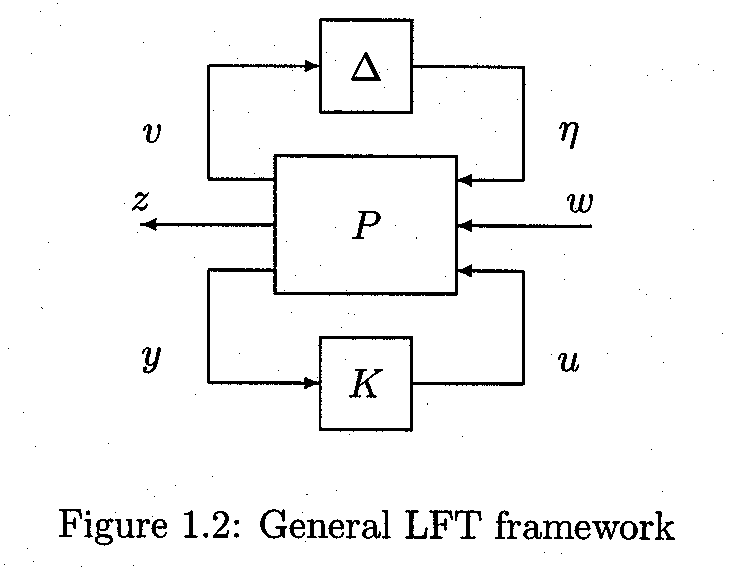
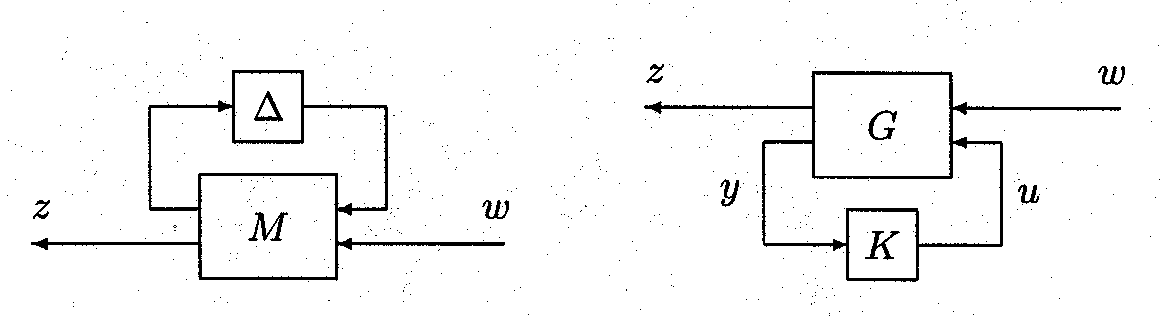
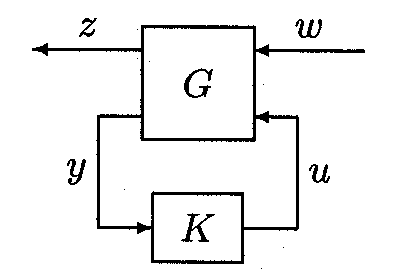
- Almost every problem can be put in a linear fractional transformation
(LFT) form:
- P: interconnection matrix, K: controller, D: the set of all possible uncertainty
- w: noises, disturbances, and reference signals; z: all controlled
signals and tracking errors; u: control signal; y: measurement.
|
|
9
|
- Chapter 2 reviews some basic linear algebra and matrix facts.
- Chapter 3 reviews system theoretical concepts: controllability,
observability, stabilizability, detectability, pole placement, observer
theory, system poles and zeros, and state space realizations.
- Chapter 4 introduces the H2 and H¥ spaces. State space methods for
computing real rational H2 and H¥ transfer matrix norms are presented.
|
|
10
|
- For example, let
- Then
- ||G(s)||22=trace(B*QB)=trace(CPC*)
- and
- ||G(s)||¥=max{g: H has an eigenvalue on jw-axis}
- where P and Q are the controllability and observability Gramians and
|
|
11
|
- Chapter 5 introduces the feedback structure and discusses its stability.
- We define that the above closed-loop system is internally stable if and
only if
|
|
12
|
- Chapter 6 considers the feedback system properties and design
limitations. The formulations of optimal H2 and H¥ control
problems and the selection of weighting functions are also considered in
this chapter.
- Chapter 7 considers the problem of model reduction using balanced
truncation method. Suppose
- is a balanced realization with controllability and observability
Gramians P=Q=S=diag(S1, S2)
|
|
13
|
- S1=diag(s1Is1,
s2Is2,…,
srIsr),
- S1=diag(sr+1 Isr+1,
sr+2Isr+1,…,
sNIsN)
- Then the truncated system
- is stable and satisfies an additive error bound:
- ||G(s)-Gr(s)||¥ £2(sr+1+sr+2+…+sN)
- Frequency weighted balanced truncation method is also presented.
|
|
14
|
- Chapter 8 derives robust stability tests for systems under various
modeling assumptions through the use of the small gain theorem. In
particular, we show that a system shown below, with an unstructured
uncertainty D ÎRH¥ with ||D||¥ <1, is
robustly stable if and only if ||Tzw||¥ £1 , where Tzw
is the matrix transfer function from w to z.
|
|
15
|
- Chapter 9 introduces LFT in detail. We show that many control problems
can be formulated and treated in the LFT framework. In particular, we
show that every analysis problem can be put in an LFT form with some
structured D(s) and some interconnection matrix M(s) and
every synthesis problem can be put in an LFT form with a generalized
plant G(s) and a controller K(s) to be designed.
|
|
16
|
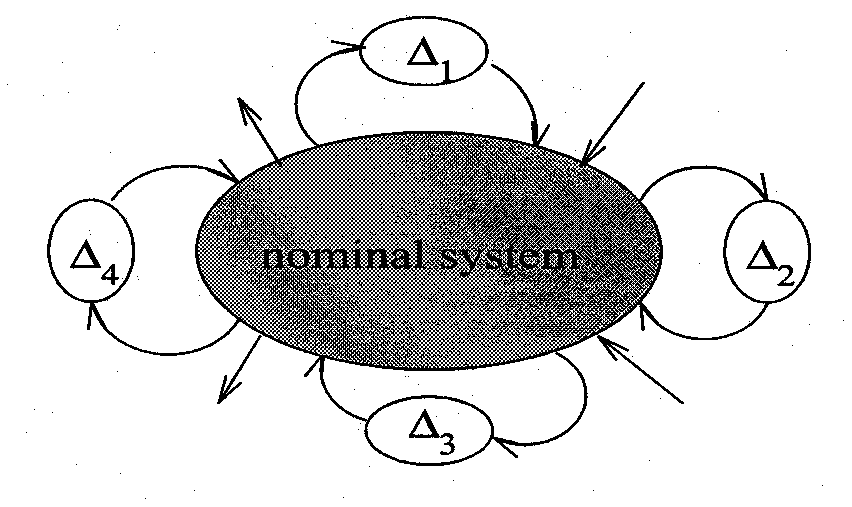
- Chapter 10 considers robust stability and performance for systems with
multiple sources of uncertainties. We show that an uncertain system is
robustly stable and satisfies some H¥ performance criterion for all Di ÎRH¥ with ||Di||¥ <1 if and only if the structured singular
value of the corresponding interconnection model is no greater than 1.
|
|
17
|
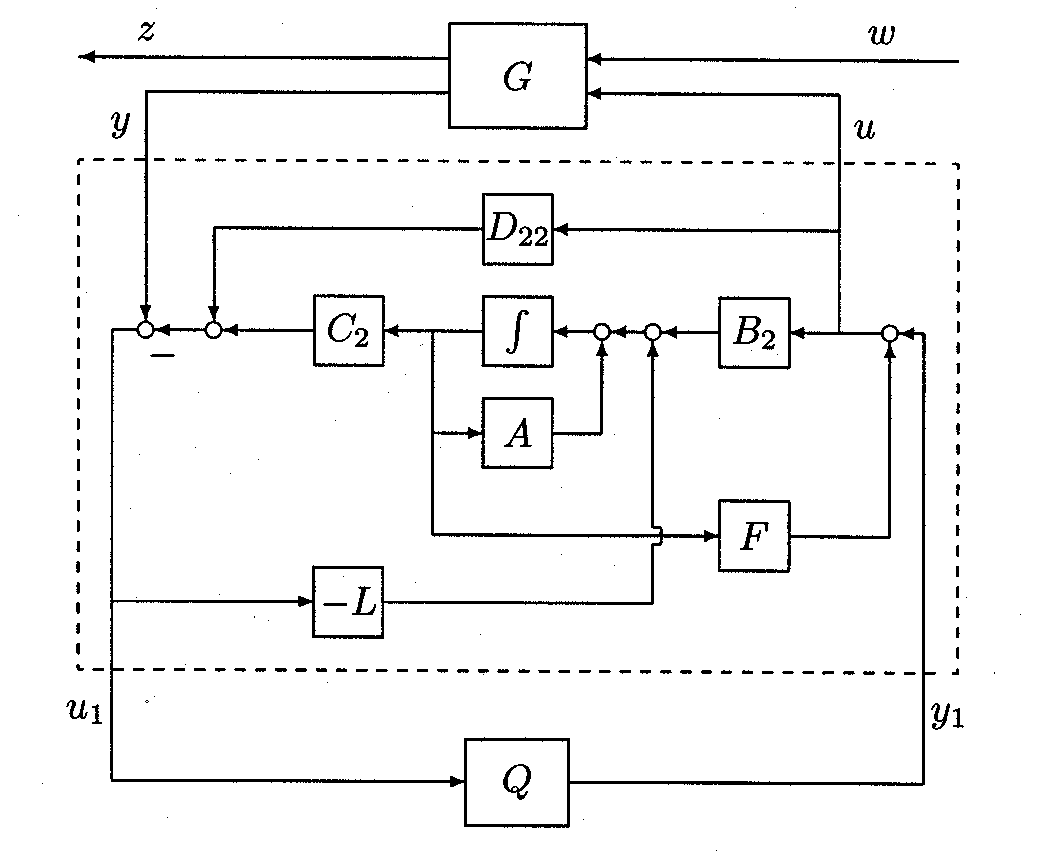
- Chapter 11 characterizes all stabilizing controllers for a given
dynamical system G(s).
- All stabilizing controllers can
be parameterized as the transfer matrix from y to u where F and L are
such that A+B2F and A+LC2 are stable and where Q
is any stable proper transfer matrix.
|
|
18
|
- Chapter 12 studies the stabilizing solution to an Algebraic Riccati
Equation (ARE):
- A*X+XA+XRX+Q=0
- I.e., A+RX is stable.
- Suppose H has no jw-axis
eigenvalues and X-(H) is the stable invariant subspace of H and
suppose X1 is nonsingular, then X=Ric(H):=X2 X1-1
is the stabilizing solution. A key result of this chapter is the
so-called Bounded Real Lemma: G(s)ÎRH¥ with ||G(s)||¥ <1 if and only if there exists an X such that
A+BB*X/g2
is stable and
- XA+A*X+XBBX *X/g2
+C*C=0.
|
|
19
|
- Chapter 13 treats the H2 optimal control.
|
|
20
|
- Chapter 14 treats H¥ control with some simplified assumptions: R1=I,
R2=I, D12*C1=0, and B1D21*=0.
We show that there exists an admissible controller such that ||Tzw||¥ <g if and only if the
following three conditions hold:
- (i) H¥
Îdom(Ric) and
X¥
:=Ric(H¥)>0, where
- (ii) J¥
Îdom(Ric) and
Y¥
:=Ric(J¥)>0, where
- (iii) r(X¥Y¥)< g2.
|
|
21
|
- Moreover, an admissible controller such that ||Tzw||¥ <g is given by
- We then consider the general H¥ control problem. We indicate how various
assumptions can be relaxed to accommodate other more complicated
problems, such as singular control problems. We also consider the
integral control in the H2 and H¥ theory and show how the general H¥ solution
can be used to solve the H¥ filtering problem.
|
|
22
|
- Chapter 15 considers the design of reduced-order controllers by means of
controller order reduction. Special attention is paid to the controller
reduction methods that preserve the closed-loop stability and
performance. Methods are presented that give sufficient conditions in
terms of frequency-weighted model reduction.
|
|
23
|
- Chapter 16 first solves a special H¥ minimization problem. Let be a normalized left
coprime factorization. Then we show that
- This implies that there is a robustly stabilizing controller for
with
- if and only if
- Using this stabilization result, a loop-shaping design technique is
proposed. This technique uses only the basis concept of loop-shaping
methods, and then a robust stabilization controller for the normalized
coprime factor perturbed system is used to construct the final
controller.
|
|
24
|
- Chapter 17 introduces the gap metric and the n-gap metric. The frequency domain interpretation
and applications of the n-gap metric are discussed. The controller order
reduction in the gap or n-gap metric framework is also considered.
- Chapter 18 considers briefly the problems of model validation and the
mixed real and complex m analysis and synthesis.
- All computations in the book are done using MATLAB and the m Analysis and Synthesis
Toolbox. Many other toolboxes may be used in the place of m-toolbox.
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}