|
1
|
- background
- H¥ :
1984 workshop approach
- assumptions
- output feedback control
- a matrix fact
- inequality characterization
- connection between ARE and ARI (LMI)
- proof for necessity
- proof for sufficiency
- comments
- optimality and dependence on g
- H¥ controller structure
- example
- an optimal controller
- H¥
control: general case
- relaxing assumptions
- H2 and H¥ integral control
- H¥
filtering
|
|
2
|
- Initial theory was SISO (Zames, Helton, Tannenbaum)
- Nevanlinna-Pick interpolation
- Operator-theoretic methods (Sarason, Adamjan et al, Ball-
- Helton)
- Initial work handled restricted problems (1-block and 2-block)
- Solution to 2x2-block problem
- (1984 Honeywell-ONR Workshop)
|
|
3
|
- Solution approach:
- Parametrize all stabilizing
controllers via [Youla et al]
- Obtain realizations of the
closed-loop transfer matrix
- Transform to 2x2 block general
distance problem
- Reduce to the Nehari problem and
solve via Glover
- Properties of the solution:
- State-space using standard
operations
- Computationally intensive (many
Ric. eqns.)
- Potentially high-order
controllers
- Find solution < g , iterate for optimal
|
|
4
|
- Consider a general LFT system
- Assumptions:
- (i) (A, B1) is controllable and (C1,A) is
observable;
- (ii) (A,B2) is stabilizable and (C2,A) is
detectable;
- (iii) D12*[C1, D12]=[0 I ]
- (iv)
|
|
5
|
- (i) Together with (ii) guarantees that the two H2 AREs have
nonnegative stabilizing solutions.
- (ii) Necessary and sufficient for G to be internally stabilizable.
- (iii) The penalty on z = C1x + D12u includes a
nonsingular, normalized penalty on the control u. In the conventional H2
setting this means that there is no cross weighting between the state
and control and that the control weight matrix is the identity.
- (iv) w includes both plant disturbance and sensor noise, these are
orthogonal, and the sensor noise weighting is normalized and
nonsingular.
- These assumptions simplify the theorem statements and proofs, and can
be relaxed..
|
|
6
|
- Solution: $ K such
that ||Tzw||¥ < g if and only if
- (i) X¥
>0
- X¥
A+A*X¥ +X¥ (B1B1*/g2-B2B2*)X¥+C1*C1=0
- (ii) Y¥
>0
- AY¥
+Y¥ A*+Y¥ (C1*C1/g2-C2*C2)Y¥+B1 B1*=0
- (iii) r(X¥ Y¥ )<
g2
- Furthermore,
- where A¥ :=A+B1B1*X¥/g2+B2F¥+ Z¥ L¥ C2
- F¥
:=-B2*X¥ , L¥ :=-Y¥ C2* , Z¥ =(I-Y¥X¥ /g2)-1
|
|
7
|
- [Packard, 1994] Suppose X, YÎRnxn, and X=X*>0, Y=Y*>0. Let r
be a positive integer. Then there exist matrices
X12ÎRnxr , X2 Î Rrxr such
that X2=X2*, and
- if and only if
|
|
8
|
- Proof.(Ü ) By assumption, there is a matrix X12ÎRnxr such
that X-Y-1=X12X12*. Defining X2:=Ir
completes the construction.
(Þ )
Using Schur complements,
- Y=X-1+X-1X12(X2-X12*X-1
X12)-1 X12* X-1
- Inverting, using the matrix inversion lemma, gives
- Y-1=X-X12*X-1 X12*
- Hence, X-Y-1=X12 X2-1X12*³0, and indeed,
- rank(X-Y-1)=rank(X12
X2-1X12)£ r.
|
|
9
|
|
|
10
|
|
|
11
|
|
|
12
|
|
|
13
|
- Lemma ARE: [Ran abd Vreugdenhil,
1988] Suppose (A,B) is controllable and there is an X = X* such that
- Q(X):=XA+A*X+XBB*X+Q<0.
- Then there exists a solution X+>X to the Riccati equation
- X+A+A*X++X+BB*X++Q=0 (0.7)
- such that A+BB*X+ is antistable
- Proof. Let X be such that Q(X) < 0.
Choose F0 such that A0 := A- BF0
is antistable. Let X0=X0* solve
- X0A0+A0*X0-F0*F0+Q=0.
|
|
14
|
- Define G0:=F0+B*X. Then
- (X0-X)A0+A0*(X0-X)=G0*G0-Q(X)>0
- and X0 > X (by anti-stability of A0).
- Define a non-increasing sequence of hermitian matrices {Xi}:
- X0 ³
X1 ³ … ³ Xn-1 >X,
- Ai= A- BFi
, is anti-stable, i = 0,…., n-1;
- Fi=-B*Xi-1, i=1, …, n-1;
- XiAi+Ai*Xi=Fi*Fi-Q,
i=0,1,…,n-1. (0.8)
- By Induction: We show this sequence can indeed be defined.
- Introduce Fn=-B*Xn-1 , An= A- BFn.
- We show that An is antistable. Using (0.8), with i = n-1, we
get
- Xn-1An+An*Xn-1+Q -Fn*Fn-(Fn-Fn-1)*(Fn-Fn-1)=0.
|
|
15
|
- Let Gn:=Fn+B*X.
Then
- (Xn-1-X)An+An*(Xn-1-X)=Gn*Gn-Q(X
)+(Fn-Fn-1)*(Fn-Fn-1)>0
- which implies that An is antistable by Lyapunov stability
theorem since Xn-1-
X>0.
- Let Xn be the unique solution of
- Xn An +An*Xn = Fn*Fn
–Q. (0.9)
- Then Xn is hermitian. Next, we have
- (Xn-X)An+An*(Xn-X)=Gn*Gn-Q(X
)>0
- (Xn-1-Xn)An+An*(Xn-1-Xn)=(Fn-Fn-1)*(Fn-Fn-1)³0
- Since An is antistable, we have Xn-1³ Xn >X.
- Therefore, we have a non-increasing sequence {Xi}.
|
|
16
|
|
|
17
|
|
|
18
|
|
|
19
|
|
|
20
|
|
|
21
|
|
|
22
|
|
|
23
|
|
|
24
|
|
|
25
|
|
|
26
|
|
|
27
|
|
|
28
|
|
|
29
|
|
|
30
|
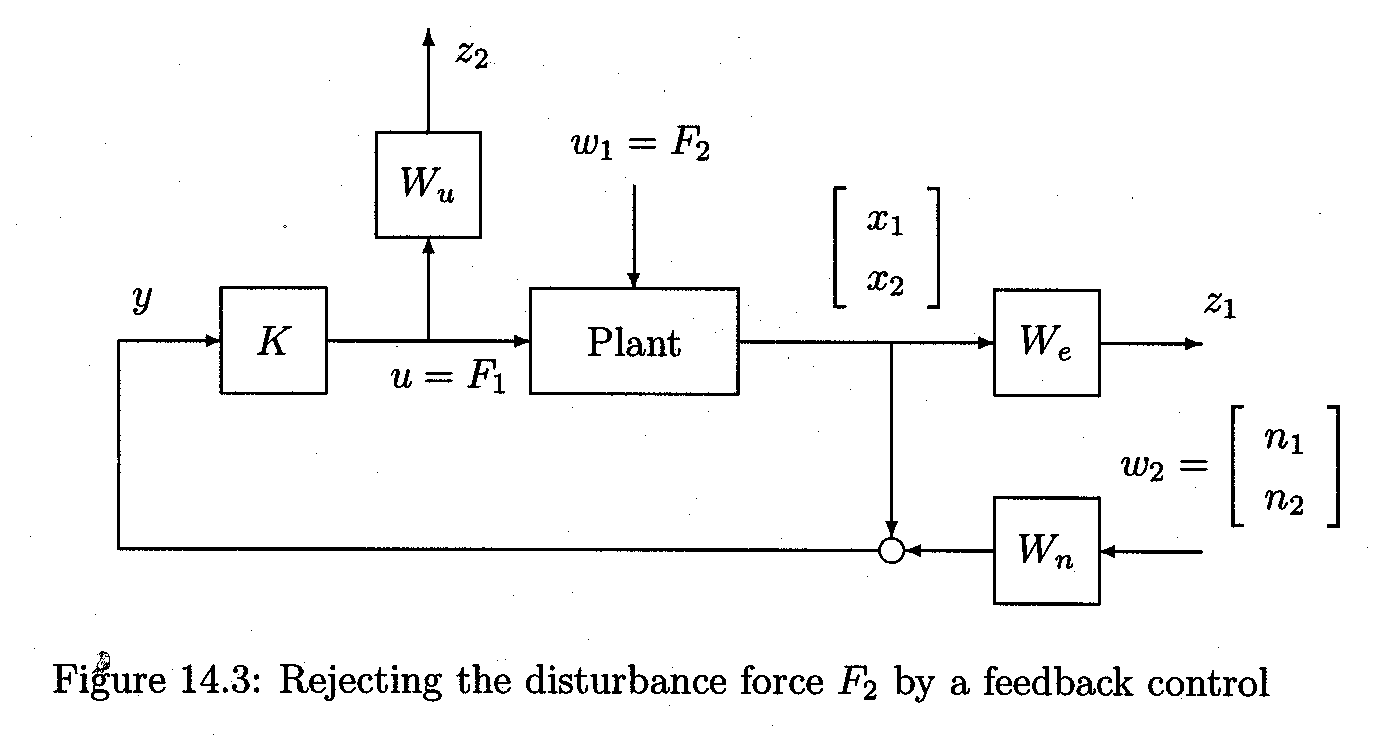
- Consider again the two-mass/spring/damper system shown in Figure 0.1.
Assume that F1 is the control force, F2 is the
disturbance force, and the measurements of x1 and x2
are corrupted by measurement noise:
- Our objective is to design a control law so that the effect of the
disturbance force F2 on the positions of the two masses x1
and x2, are reduced in a frequency range 0£w£2.
|
|
31
|
|
|
32
|
|
|
33
|
|
|
34
|
|
|
35
|
|
|
36
|
|
|
37
|
|
|
38
|
|
|
39
|
|
|
40
|
|
|
41
|
|
|
42
|
|
|
43
|
|
|
44
|
|
|
45
|
|
|
46
|
|
|
47
|
|
|
48
|
|
|
49
|
|
|
50
|
|
|
51
|
|
|
52
|
|
|
53
|
|
|
54
|
|
|
55
|
|
|
56
|
|
|
57
|
|
|
58
|
|
|
59
|
|
|
60
|
|
|
61
|
|
|
62
|
|
|
63
|
|
|
64
|
|
|
65
|
|
|
66
|
|
|
67
|
|
|
68
|
|
|
69
|
|
|
70
|
|
|
71
|
- There exists a causal filter F(s)ÎRH¥ such that
J< g2
if and only if J¥ Îdom(Ric) and
Y¥ =Ric(J¥ ) ³0
- where Y¥
is the stabilizing solution to
|

 Notes
Notes{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}